



 行研数据库
行研数据库
-
 图表数据
图表数据 - 产业概述
- 竞争格局
- 技术变革
- 行业数据
- 政策法规
- 商业模式
- 产业链

- 市场容量
- 图说行业
-
 研究报告
研究报告 - 行业精选
- 投资策略
- 公司研究
- 原创报告
- 原创图表
- 全文检索
- 目录查询
- 专题报告
- 数说行业

-
 产业数据
产业数据 - 深度新闻
- 产业图谱
- 产业标签
- 产业数据
- 行业榜单
- 品牌数据
- 行业政策
- 行业标准
- 行业会展
 创投数据库
创投数据库
-
 创业投资
创业投资 - 国内项目
- 海外项目
- 独角兽
- 创投机构
- 机构战绩
- 创投动态
- 热门赛道
- 热门机构
-
 基金备案
基金备案 - 创投管理人
- 证券管理人
- 其他管理人
- 创业基金
- 股权基金
- 证券基金
- 金融机构
- TOP500
-
 城市经济
城市经济 - 数据分析
- 基本信息
- 经济数据
- 投资基金
- 上市公司
- 特色企业
- 宏观数据
- 央企数据
- 创投全景
 证券数据库
证券数据库
-
 招股书
招股书 - 中国主板
- 中国科创板
- 中国创业板
- 新三板
- 香港主板
- 纽交所中概股
- 纳斯达克中概股
- 中介机构
-
 证券研究
证券研究 - 个股查询
- 行业板块
- 概念板块
- 机构调研
- 股票交易
- 外汇数据
- 期货数据
- 热门板块
-
 上市发行
上市发行 - 新股上会
- 最新申报
- 上会通过
- 暂缓表决
- 取消审核
- 上市辅导
- 新股上会
 商业数据库
商业数据库
-
 专业数据
专业数据 - 城市经济数据库
- 创业投资数据库
- 中央企业数据库
- 行业研究数据库



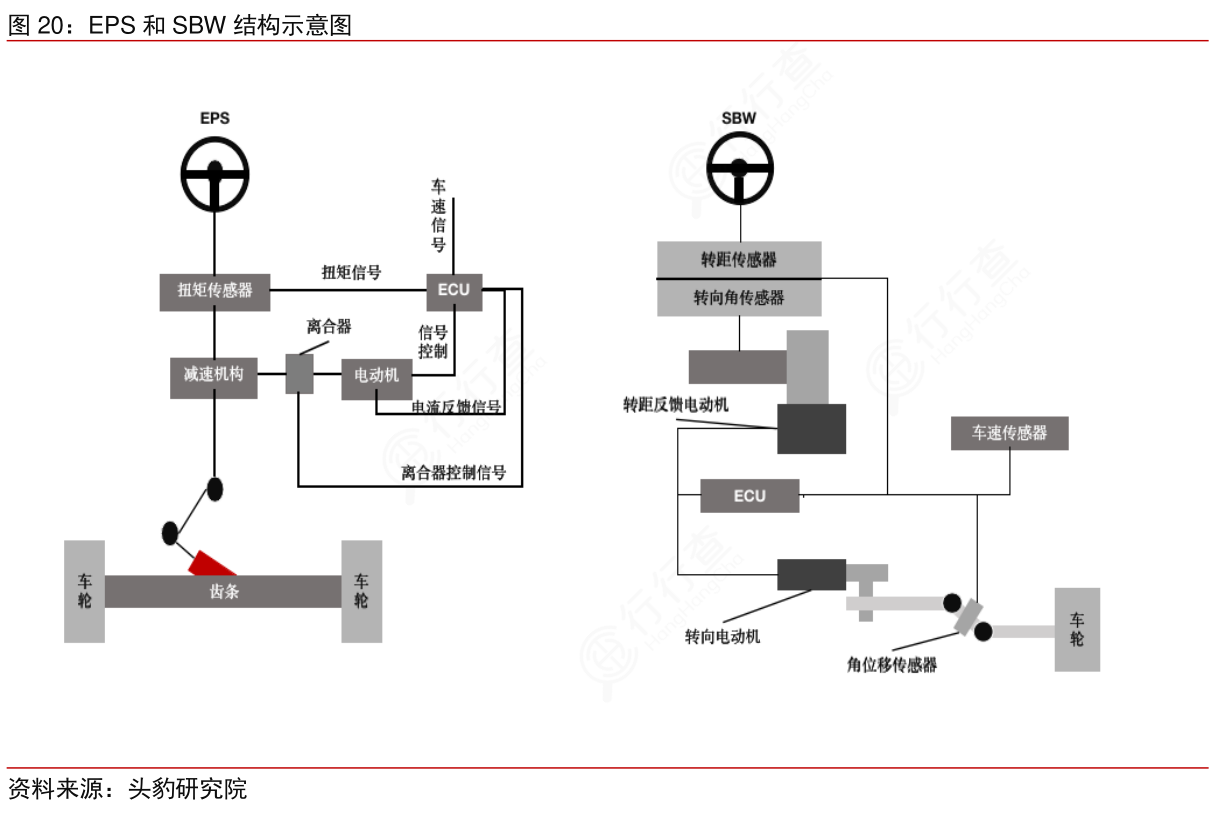
线控转向来源于电子助力转向,电子元件数量进一步上升。SBW在EPS的基础之上发展而来,与EPS相比最大的不同是取消了方向盘和转向轮之间的物理连接,增加了转矩传感器、转向角传感器、转矩反馈电机、车速传感器等电子件,力反馈电机和转向执行电机的算法控制变得更为复杂,进一步提升了转向系统的电子化程度。同时,为了保证可靠性和模拟路感,SBW相对于EPS需要增加冗余功能,若增加电气冗余系统及路面信息回馈系统,所需传感器、电机和ECU的数量会进一步增加。例如,博世采用的电控系统备份冗余式SBW,在方向盘处布置多个传感器以实现输入信号的冗余度,转向机构采用多个电机+ECU系统来实现控制冗余。










